Nessun prodotto nel carrello.

Come calcolare la coppia di azionamento del motore per i sistemi di cinghie e pulegge
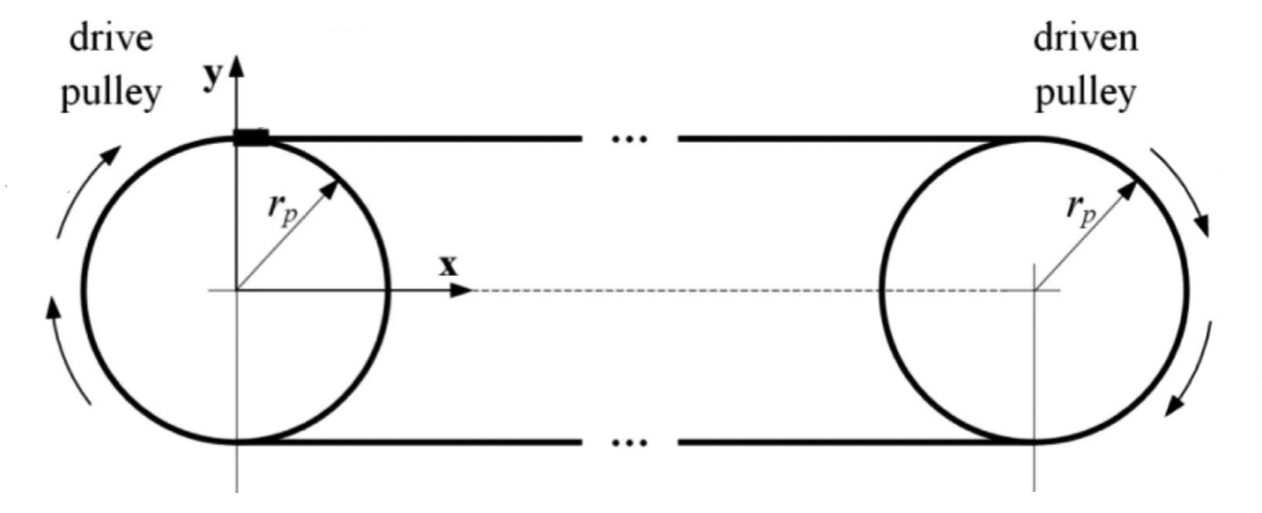
I sistemi lineari a cinghia sono comuni nelle applicazioni che richiedono lunghi viaggi e alta velocità, come i robot a portale e la movimentazione e il trasporto dei materiali. I motori scelti per questi sistemi sono spesso servomotori , per la loro capacità di controllare con precisione posizione, velocità e coppia.
Il dimensionamento e la selezione del servomotore richiedono la determinazione delle coppie di azionamento continue e intermittenti richieste per l’applicazione. La coppia continua viene calcolata prendendo la radice quadrata media di tutti i requisiti di coppia nell’applicazione: coppia richiesta per l’accelerazione, coppia per velocità costante e coppia per decelerazione. Nella maggior parte delle applicazioni, la coppia massima (intermittente) si verifica durante l’accelerazione.
Per determinare la coppia quadratica media (continua), calcoliamo prima i valori di coppia richiesti durante ciascuna fase del profilo di movimento.
Coppia richiesta per velocità costante
Per un sistema di trasmissione a cinghia, la coppia del motore richiesta durante la velocità costante è semplicemente la forza assiale totale (F a ) sulla cinghia moltiplicata per il raggio (r 1 ) della puleggia motrice.
T c = coppia richiesta durante la velocità costante (Nm)
F a = forza assiale totale (N)
r 1 = raggio della puleggia motrice (mm)
η = efficienza del sistema di trasmissione a cinghia
Si noti che l’efficienza (η) del sistema di trasmissione a cinghia è inclusa nell’equazione della coppia. Questa efficienza tiene conto delle perdite come l’attrito tra la cinghia e le pulegge. Si noti inoltre che abbiamo ipotizzato che la trasmissione e le pulegge folli (condotte) abbiano lo stesso raggio, come spesso accade per i sistemi di movimento lineare azionati da cinghia.
 A differenza degli azionamenti a vite , che spesso incontrano forze assiali dovute a operazioni esterne come la pressatura o la foratura, le trasmissioni a cinghia non sono progettate per resistere a forze assiali esterne. Quindi la forza assiale totale per un sistema di trasmissione a cinghia consiste solo nella forza richiesta per spostare il carico, che è il peso (m * g) del carico (sia il carico esterno che la cinghia) moltiplicato per il coefficiente di attrito (μ ) della guida che sostiene il carico.
A differenza degli azionamenti a vite , che spesso incontrano forze assiali dovute a operazioni esterne come la pressatura o la foratura, le trasmissioni a cinghia non sono progettate per resistere a forze assiali esterne. Quindi la forza assiale totale per un sistema di trasmissione a cinghia consiste solo nella forza richiesta per spostare il carico, che è il peso (m * g) del carico (sia il carico esterno che la cinghia) moltiplicato per il coefficiente di attrito (μ ) della guida che sostiene il carico.
![]()
m = massa del carico spostato (carico esterno più cinghia) (kg)
g = gravità (m / s 2 )
μ = coefficiente di attrito della guida
Coppia richiesta per l’accelerazione
La fase di accelerazione del profilo di movimento è tipicamente il periodo in cui è richiesta la coppia massima dal motore, e questo valore di coppia, T a , è spesso preso come coppia intermittente.
La coppia richiesta durante l’accelerazione include la coppia richiesta a velocità costante più la coppia richiesta per accelerare il carico.
![]()
T a = coppia totale richiesta durante l’accelerazione (Nm)
T acc = coppia richiesta a causa dell’accelerazione (Nm)
La coppia dovuta all’accelerazione si ottiene moltiplicando l’inerzia totale del sistema (J t ) per l’accelerazione angolare (α). ![]()
J t = inerzia totale del sistema (kgm 2 )
a = accelerazione angolare (rad / s 2 )
L’inerzia totale del sistema include l’inerzia del motore (poiché il motore deve superare la propria inerzia), l’accoppiamento, le pulegge e il carico.
![]()
J m = inerzia del motore (fornita dal produttore) (kgm 2 )
J c = inerzia del giunto (fornita dal produttore) (kgm 2 )
J p1 = inerzia della puleggia motrice (fornita dal produttore o calcolata) (kgm 2 )
J p2 = inerzia della puleggia folle (fornita dal produttore o calcolata) (kgm 2 )
J l = inerzia del carico (kgm 2 )
Sebbene abbiamo ipotizzato sopra che la puleggia motrice e quella folle abbiano lo stesso raggio, le loro inerzie possono essere leggermente diverse, poiché la puleggia motrice è dentata e, quindi, ha un raggio leggermente maggiore e una massa maggiore della puleggia folle.
I valori di inerzia del motore, dell’accoppiamento e delle pulegge sono generalmente specificati dai rispettivi produttori. Tuttavia, è necessario calcolare l’inerzia del carico. Ricorda che il carico include la massa sia del carico esterno che della cinghia, poiché il motore deve generare una coppia sufficiente per superare l’inerzia della cinghia.
![]()
m l = massa del carico esterno (kg)
m b = massa della cinghia (kg)
r 1 = raggio della puleggia motrice (mm)
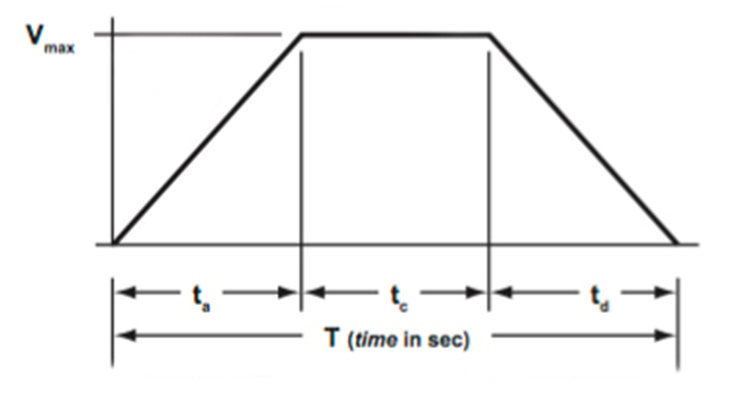
Per l’accelerazione angolare, assumiamo che il sistema stia accelerando da zero a una certa velocità massima, dove N è la velocità angolare massima e t è il tempo per accelerare.
![]()
N = velocità angolare massima (rpm)
t = tempo per l’accelerazione (s)
Se il sistema sta accelerando da una velocità diversa da zero, l’equazione incorporerebbe semplicemente la variazione di velocità (ΔN) divisa per il tempo durante il quale si è verificato l’aumento di velocità (Δt).
Coppia richiesta per la decelerazione
La coppia di azionamento del motore richiesta per la decelerazione è uguale alla coppia a velocità costante meno la coppia dovuta all’accelerazione.
![]()
T d = coppia richiesta durante la decelerazione (Nm)
Coppia continua
Ora che conosciamo le coppie di azionamento del motore richieste durante l’accelerazione, la velocità costante e la decelerazione, possiamo calcolare la radice quadrata media di questi valori per determinare la coppia continua richiesta dal motore.
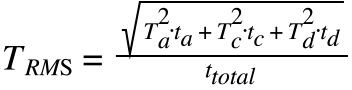
T RMS = coppia quadratica media (continua) (Nm)
t a = tempo per l’accelerazione (s)
t c = tempo per velocità costante (s)
t d = tempo di decelerazione (s)
t totale = tempo totale per il movimento (incluso qualsiasi tempo di inattività tra le mosse) (s)
Credito immagine caratteristica: Rollon SpA